
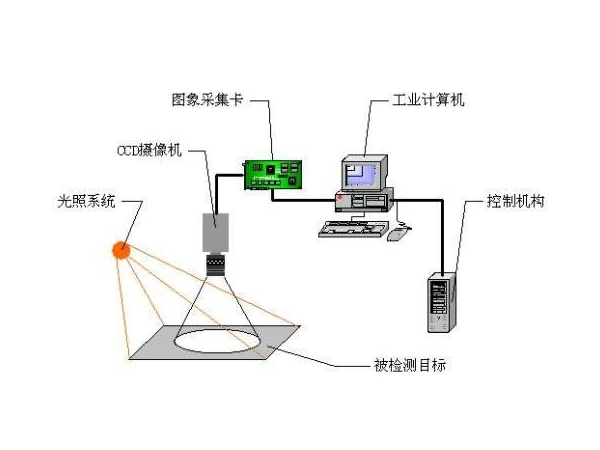
Using the real-time image captured by the camera, the position difference between the real-time image and the already programmed theoretical image is processed by special software and transmitted to the robot, and the robot automatically modifies the position of the corresponding tool to grab the sheet.
advantage:
Easy and fast adjustment
Cost is lower than mechanical
Universal application
Disadvantages:
Detection accuracy is susceptible to external conditions such as light and vibration
Take up a lot of space






Copyright @ 2018 Jiangsu VODA Robots Technology 苏ICP备18021539号 All rights reserved.Support:Eastnet [Manage]
